






 POPULAR PRODUCTS
POPULAR PRODUCTS CKR-183
CKR-183
T4 TRANSFORMING ROBOTStock Number:
1511-RH1CKR-183
T4 TRANSFORMING ROBOTStock Number:
1511-RH1
Learning through play! This kit easily transforms between one of four different modes; a walking Robot, a 6 legged walking Rhino Beetle, walking T-Rex with moving jaws and a moving Drill Vehicle with a drilling bit similar to a miner's driller! This transforming kit is co...More$18.95 CADAvailable OnlineAvailable in StoresView Details 2760384
2760384
SD CARD SHIELD COMPATIBLE WITH ARDUINOStock Number:
1813-FB22760384
SD CARD SHIELD COMPATIBLE WITH ARDUINOStock Number:
1813-FB2
The SD card shield adds storage to your Arduino project. It supports SD, SDHC, or MicroSD TF cards. Use the on-board toggle switch to select the SD card type.And when you want plug a sd card on it,you should select the switch to the right direction. It just uses the SPI ports...MoreREG.$9.95$4.95 CAD SAVE $5Available OnlineAvailable in StoresView Details A000079
A000079
ARDUINO MOTOR SHIELD REV3Stock Number:
1813-MF1BA000079
ARDUINO MOTOR SHIELD REV3Stock Number:
1813-MF1B
The Arduino Motor Shield is based on the L298 (datasheet), which is a dual full-bridge driver designed to drive inductive loads such as relays, solenoids, DC and stepping motors. It lets you drive two DC motors with your Arduino board, controlling the speed and direction of...More$42.95 CADAvailable OnlineAvailable in StoresView Details PROCS-007102
PROCS-007102
CURRENT SENSOR 20A ACS712 20A WITH TERMINALStock Number:
1815-SA13PROCS-007102
CURRENT SENSOR 20A ACS712 20A WITH TERMINALStock Number:
1815-SA13$6.95 CADAvailable OnlineAvailable in StoresView Details WPA509
WPA509
ACCESSORIES KIT WITH CLEAR PLASTIC BOX COMPATIBLE W/ARDUINOStock Number:
1817-ZE1WPA509
ACCESSORIES KIT WITH CLEAR PLASTIC BOX COMPATIBLE W/ARDUINOStock Number:
1817-ZE1
Included in this assortment:210 piece resistor set. 30 each value ( 100R, 4K7, 1K, 10k, 47K, 100K, 1M ) 4 x 50K potentiometer (K047AM) 5 x red LED 5 mm 5 x green LED 5 mm 5 x yellow LED 5 mm 6 x key button 4-pin 12 x 12 mm 9 x round cap for 4-pin key button 6 x square cap fo...More$12.95 CADAvailable OnlineAvailable in StoresView Details K2B-1349-4GB
K2B-1349-4GB
RASPBERRY PI4 B STARTER KIT 4GB 32GB MICRO SDStock Number:
1821-JG2K2B-1349-4GB
RASPBERRY PI4 B STARTER KIT 4GB 32GB MICRO SDStock Number:
1821-JG2
Included The latest model of Raspberry Pi, the 4B with your choice of 2GB, or 4GB of RAM. HighPi case for Raspberry Pi 4 USB-C Power Supply, 5.1V 3.0A, Black, UL Listed Class 10 microSD Card With Raspberry Pi OS (Raspbian) - 32GB HDMI A male to Micro D male cable, 3ft USB...More$214.95 CADAvailable OnlineAvailable in StoresView Details SC-130
SC-130
SNAP CIRCUITS JUNIOR SELECT BUILD OVER 130 PROJECTSStock Number:
2011-CJ3SC-130
SNAP CIRCUITS JUNIOR SELECT BUILD OVER 130 PROJECTSStock Number:
2011-CJ3
Features: With Snap Circuits�- YOU Learn by Doing� 130 projects clearly outlined in the color project manual Projects utilize a glow-in-the-dark flying propeller, phototransistor, LEDs, resistors, ICs, a DC motor and much more. No Soldering - No Tools - It'...More$52.95 CADAvailable OnlineAvailable in StoresView Details HAA40WN
HAA40WN
STROBE LIGHT 12VDC CLEAR FLASHIN LEDStock Number:
2031-AB8HAA40WN
STROBE LIGHT 12VDC CLEAR FLASHIN LEDStock Number:
2031-AB8
It's a strobe!, so it flashes about once a second....More$19.95 CADAvailable OnlineAvailable in StoresView Details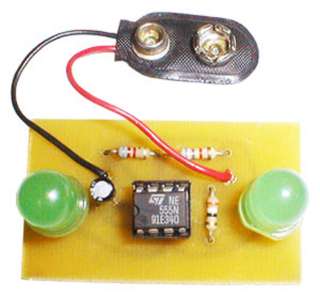 C6791
C6791
GREEN LED FLASHER XXLStock Number:
2032-AB7C6791
GREEN LED FLASHER XXLStock Number:
2032-AB7
Our extra large (XXL) LED Flasher Kit features 2 mammoth (10MM) green LEDs that alternately flash. Circuit uses 1 IC. Great for hundreds of applications! In fact, if you need to attract attention in a large way the XXL size is for you....More$8.95 CADAvailable Online 1Not Available in Stores.View Details P8-8300
P8-8300
WORLDS SIMPLEST MOTOR-PHYSICS BASED ON ELECTRICITY & MAGNETISMStock Number:
2651-AF1P8-8300
WORLDS SIMPLEST MOTOR-PHYSICS BASED ON ELECTRICITY & MAGNETISMStock Number:
2651-AF1
Make Your Own Working Motor! This kit contains everything you need to make your own working motor. This simple motor is easy to put together using the comprehensive instructions. This hands-on kit teaches the fundamental principals of physics and how a motor works. How ...More$13.95 CADAvailable OnlineAvailable in StoresView Details 2770327
2770327
LITTLEBITS MOUNTING BOARDStock Number:
2799-CB1-22770327
LITTLEBITS MOUNTING BOARDStock Number:
2799-CB1-2
Mounting boards come 2 to a pack and allow you to keep your circuit intact and move it around with ease! Simply snap together your littleBits circuit and press the feet of your modules into the holes of the mounting board. *Hold your circuit upside down, vertically, and carry it ...More(2 PCS/PKG)$9.95 CADAvailable OnlineAvailable in StoresView Details 870262
870262
MOTOR AND PROPELLER CAR KITStock Number:
3525-NG7870262
MOTOR AND PROPELLER CAR KITStock Number:
3525-NG7
Students build a battery-powered car by constructing a u-shape body. They then install the mechanism and race it down the hall! Includes wood blank, motor, gears, battery holder, wheels and axles. ......More$15.95 CADAvailable OnlineAvailable in StoresView Details ICX010
ICX010
EMPIRE STATE BUILDING METAL EARTH 3D METAL MODEL KITSStock Number:
5194-ZB178ICX010
EMPIRE STATE BUILDING METAL EARTH 3D METAL MODEL KITSStock Number:
5194-ZB178
Premium Series Empire State Building Empire State Building is a 102-stor...More$19.95 CADAvailable OnlineAvailable in StoresView Details 257
257
ALUMINUM SHEET 10 X4X.064INStock Number:
6011-KA3A257
ALUMINUM SHEET 10 X4X.064INStock Number:
6011-KA3A$7.95 CADAvailable OnlineAvailable in StoresView Details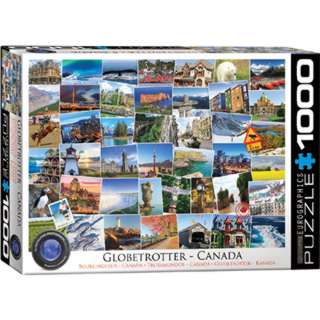 6000-0780
6000-0780
PUZZLE GLOBETROTTER CANADA JIGSAW 19.25 X 26.62INStock Number:
7511-GL16000-0780
PUZZLE GLOBETROTTER CANADA JIGSAW 19.25 X 26.62INStock Number:
7511-GL1$19.95 CADAvailable OnlineAvailable in StoresView Details 30-222-1
30-222-1
DB25F CRIMP TINStock Number:
AAB-18130-222-1
DB25F CRIMP TINStock Number:
AAB-181$3.95 CADAvailable OnlineAvailable in StoresView Details 1276-1502
1276-1502
DB15F HD SOLDER TINStock Number:
AAQ-161C-51276-1502
DB15F HD SOLDER TINStock Number:
AAQ-161C-5(5 PCS/PKG)$7.95 CADAvailable OnlineAvailable in StoresView Details GC-15FSF
GC-15FSF
GENDER CHANGER 15F/15F SLIMStock Number:
ADF-4401A-1GC-15FSF
GENDER CHANGER 15F/15F SLIMStock Number:
ADF-4401A-1
The Slim DB15 Female-to-Female Gender Changer is a compact and reliable adapter designed to convert or extend DB15 connections. Whether you're working with VGA displays, legacy game ports, industrial machinery, or serial communication devices, this gender changer ensures seamless...More$4.95 CADAvailable OnlineAvailable in StoresView Details K33903US
K33903US
DATA SW BOX USB 2WAY PUSHStock Number:
AFT-111K33903US
DATA SW BOX USB 2WAY PUSHStock Number:
AFT-111
No more plugging and unplugging computer devices. With the Kensington ShareCentral 1, two computers can share a printer, hard drive, scanner--any USB device--and switch between them with the touch of a button. With a small footprint and cable management, it fits seamless...MoreREG.$24.95$12.95 CAD SAVE $12Available OnlineAvailable in StoresView Details
WIFI ANTENNA WIRELESS DUAL BAND 2.4/5GHZ HIGH GAIN WITH SMA PLUGStock Number:
AGZ-0103
WIFI ANTENNA WIRELESS DUAL BAND 2.4/5GHZ HIGH GAIN WITH SMA PLUGStock Number:
AGZ-0103$7.95 CADAvailable OnlineAvailable in StoresView Details CABSA-008347
CABSA-008347
WIFI ANTENNA WIRELESS 2DBI GSM/850E 824-894MHZStock Number:
AGZ-0204CABSA-008347
WIFI ANTENNA WIRELESS 2DBI GSM/850E 824-894MHZStock Number:
AGZ-0204$13.95 CADAvailable OnlineAvailable in StoresView Details CABSA-000675
CABSA-000675
WIFI ANTENNA WIRELESS 3DBI 850MHZ-1.9GHZ QUAD BANDStock Number:
AGZ-0304CABSA-000675
WIFI ANTENNA WIRELESS 3DBI 850MHZ-1.9GHZ QUAD BANDStock Number:
AGZ-0304$13.95 CADAvailable OnlineAvailable in StoresView Details CABSA-024031
CABSA-024031
WIFI ANTENNA WIRELESS 3DBI 2.4G 50OHMStock Number:
AGZ-0331CABSA-024031
WIFI ANTENNA WIRELESS 3DBI 2.4G 50OHMStock Number:
AGZ-0331$13.95 CADAvailable OnlineAvailable in StoresView Details CABSA-011320
CABSA-011320
WIFI ANTENNA WIRELESS 4DBI 2.4GHZStock Number:
AGZ-0431CABSA-011320
WIFI ANTENNA WIRELESS 4DBI 2.4GHZStock Number:
AGZ-0431$13.95 CADAvailable OnlineAvailable in StoresView Details
WIFI ANTENNA WIRELESS 6DBI 5GHZ 2.4GHZ DUAL BAND RP-SMA TO IPEXStock Number:
AGZ-0604A
WIFI ANTENNA WIRELESS 6DBI 5GHZ 2.4GHZ DUAL BAND RP-SMA TO IPEXStock Number:
AGZ-0604A
6dBi 2.4GHz 5GHz Dual Band WiFi RP-SMA Antenna - 35cm U.fl / IPEX to RP-SMA Antenna WiFi Wireless WAN Pigtail Cable IPEX Cables Have Bulkhead Gold Plated Connector (8mm/5/16 inch) NOTE: Only Use for MINI PCI-E Interface, Do Not Use for M.2 (NGFF) Interface Compatible with Wireles...More$13.95 CADAvailable OnlineAvailable in StoresView Details
HEAD OFFICE
SAYAL Electronics